he monitoring of submerged deadwood and vegetation is gaining increased attention due to their socio-economic and ecological importance. Deadwood acts as an important underwater habitat but also poses a threat to bridges, hydroelectric power plants and riverside buildings. Underwater vegetation, in turn, is a proxy for climate change in general and global warming in particular. In this context, UAV-borne topobathymetric laser scanning constitutes a promising tool for accurately capturing and modelling these small-scale objects in high spatial resolution.
Alluvial forests surrounding natural rivers constitute an ecologically important and sensitive habitat. Seasonal flood waves carry deadwood into the active river channels, where it floats downstream until either natural or artificial barriers (river bends, bridge piers, hydropower stations, etc.) stop its movement. Such stranded driftwood plays an important role in aquatic ecosystems, for example as a shelter for juvenile fish stages, but log jams can also damage infrastructure and residential areas. In addition to deadwood, the monitoring of littoral vegetation (i.e. submerged vegetation down to a depth where sunlight can penetrate to support photosynthesis) is gaining ever more interest, as such vegetation acts as a proxy for climate change. Submerged macrophytal vegetation reacts in a very sensitive way to increased water temperature and other parameters induced by global warming. Therefore, the monitoring of the volume and distribution of driftwood in rivers and lake outlets and of littoral vegetation is an important topic from both an ecologic and socio-economic point of view.
Game Changer
Topobathymetric Lidar is an established tool for mapping the littoral zone of coastal and inland water areas. Bathymetric Lidar uses short laser pulses in the green domain of the electromagnetic spectrum to measure objects above and below the water table. Compared to topographic sensors that use infrared laser radiation, bathymetric sensors employ a large beam divergence, which results in typical footprint diameters in the range of about 50cm for data acquisition from manned platforms. This, however, hampers the detectability of submerged logs and branches, especially for stem diameters of less than 30cm. The advent of UAV-borne topobathymetric Lidar sensors has changed this situation fundamentally, as these systems provide small laser footprint diameters of around 10cm and a high laser pulse density of > 200 points/m2.
In this article, we present the early results of detecting and modelling submerged driftwood and vegetation based on 3D point clouds acquired with a survey-grade UAV-borne topobathymetric laser scanner. We demonstrate that stems, branches and littoral vegetation are recognizable in the point cloud. The achievable point density and measurement precision furthermore allow the derivation of relevant parameters such as the length and diameter of driftwood logs and the vegetation height of macrophyte patches. This enables the quantitative analysis of submerged biomass at a high spatial resolution.
Sensor
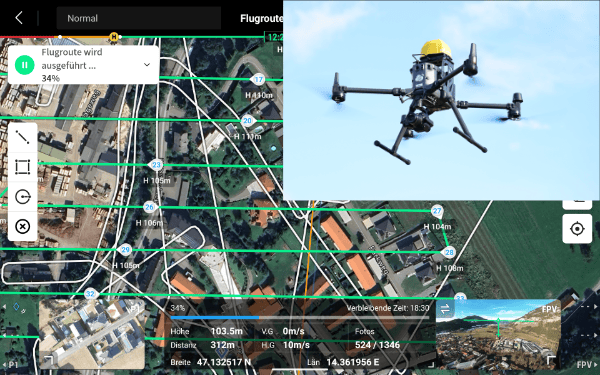
The RIEGL VQ-840-G is an integrated topobathymetric laser scanning system including a factory-calibrated IMU/GNSS system and a camera, thereby implementing a full airborne laser scanning system (see Figure 1). The lightweight, compact VQ-840-G Lidar can be installed on various platforms, including UAVs. The laser scanner comprises a frequency-doubled IR laser, emitting pulses of about 1.5ns pulse duration at a wavelength of 532mrad and a pulse repetition rate of 50–200kHz. At the receiver side, the incoming optical signals are converted into a digitized electrical signal. The laser beam divergence can be selected between 1–6mrad to allow a constant energy density on the ground for different flying altitudes and therefore balancing eye-safe operation with spatial resolution. The receiver’s iFOV (instantaneous field of view) can be chosen between 3 and 18mrad. This allows the balancing of spatial resolution and maximum depth penetration.

The VQ-840-G employs a Palmer scanner that generates a nearly elliptical scan pattern on the ground. The scan range is 20° x 14° along the flight direction, which means that the variation of the incidence angles hitting the water surface is low. Onboard time-of-flight measurement is based on online waveform processing of the digitized echo signal. In addition, the digitized waveforms can be stored on disc for offline waveform analysis. For every laser shot, echo waveform blocks with a length of up to 75m are stored unconditionally (i.e. without employing prior target detection). This opens up possibilities such as waveform stacking, variation of detection parameters or waveform analysis algorithms. The depth performance of the instrument has been demonstrated to be in the range of more than two Secchi depths for single measurements.
Study Area and Datasets
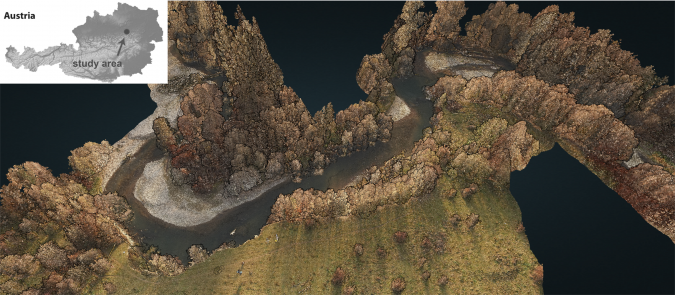
The study area is located at the tailwater of the pre-Alpine Pielach River, a tributary of the Danube River in Lower Austria. The study site is located in a Natura 2000 natural conservation area and the gravel bed river features a meandering course with frequent geomorphic changes in response to flood peaks. The mean width of the river is around 20m with a mean annual discharge of 7m3/s and a maximum depth of around 3m, allowing full coverage of the entire river bottom with topobathymetric Lidar. Alluvial vegetation (trees, bushes, shrubs) often reaches from the shore into the wetted perimeter, leading to the frequent input of wooden debris into the river. In addition, larger flood peaks transport driftwood logs from upstream into the study area, where the logs often remain for a longer period before drifting further downstream with the next flood peak.
The subsurface of the adjacent flood plain is dominated by river gravel, which was quarried in the past, leaving around a dozen groundwater-supplied ponds with a maximum depth of 5.6m and featuring patches of underwater vegetation. The occurrence of complex bathymetry as well as the presence of submerged driftwood and littoral vegetation makes the site an ideal study area for UAV-borne topobathymetric Lidar.
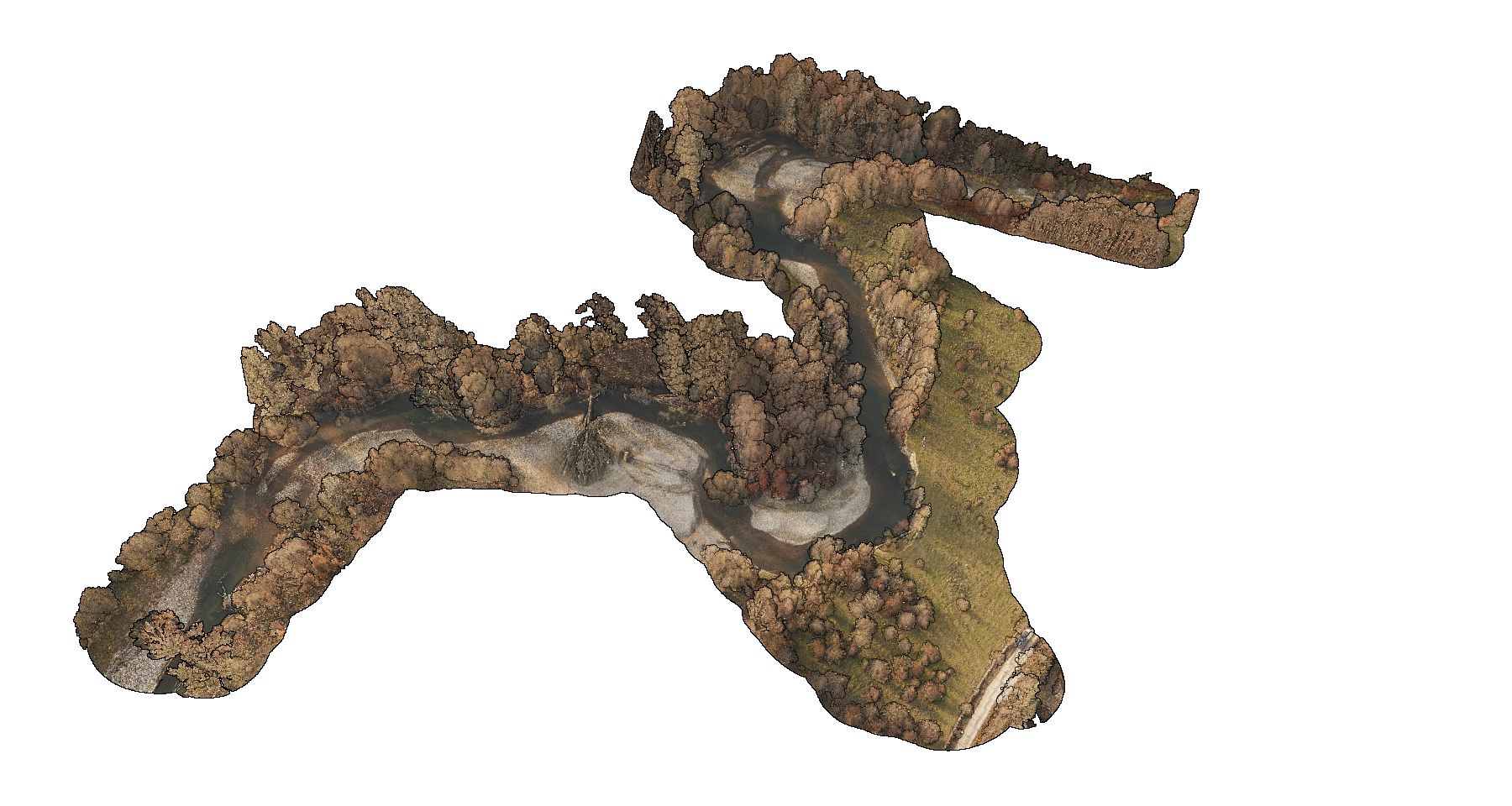
The area has been surveyed twice with the RIEGL VQ-840-G in the recent past. In November 2021, the scanner was mounted on an octocopter UAV operated from 50–60m above ground level with a beam divergence of 1–2mrad, providing footprint diameters of around 1dm, and with a pulse rate of 50kHz and 200kHz. A simultaneous UAV-based photogrammetry flight mission served as a basis for colouring the Lidar point cloud (see Figure 2). In February 2022, the same instrument was mounted on a helicopter platform. While the aim of the UAV-borne acquisition was maximum spatial resolution to detect submerged logs and branches, the focus of the helicopter integration was to maximize the penetration depth. For this reason, a larger beam divergence of 5mrad was used together with a receiver FoV of 9mrad, delivering full bottom coverage of the surveyed ponds alongside additional vegetation heights.
Methods and Results
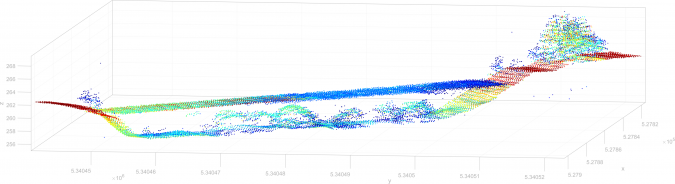
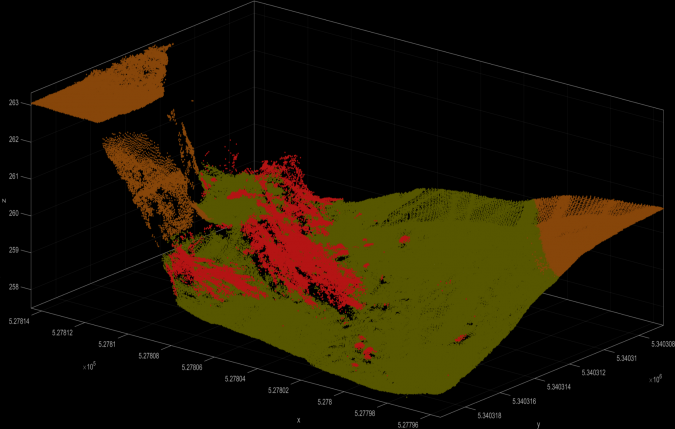
The processing pipeline mainly followed the standard bathymetric Lidar workflow. After strip alignment and georeferencing, we modelled a continuous water surface model from all air-water interface Lidar reflections and performed run-time and refraction corrections of the raw measurements. The corrected points served as the basis for deriving the DTM (bare ground + submerged bottom). In addition, the volumetric point density of all remaining water column points enabled automatic classification of the underwater vegetation. Visual analysis revealed two categories of submerged vegetation: (i) single broad tree stems and (ii) bunches of smaller branches and vegetation patches.
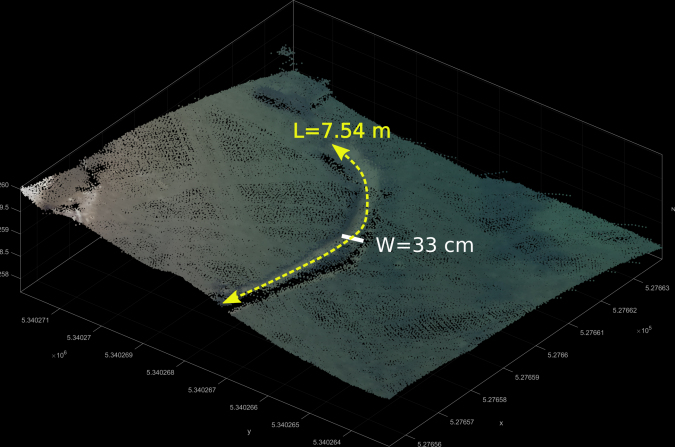
Figure 3 shows a 3D point cloud of a large individual stem coloured by RGB and Figure 4 features many thin branches of an entire willow tree coloured by classification. Both examples prove the feasibility of (i) detecting and (ii) automatically classifying underwater vegetation from UAV-borne topobathymetric point clouds. The length and width of the stem in Figure 3a are 7.54m and 33cm respectively. In contrast to deadwood in dry forests, submerged driftwood is often sparser and the absence of understorey facilitates detection. On the other hand, forward scattering of the laser signal underwater leads to blurring of the point clouds, which complicates the automatic detection of dense small structures (branches) and the precise estimation of vegetation patches due to progressive broadening of submerged driftwood point clouds with increasing water depth. Patches of submerged macrophyte vegetation are shown in Figure 5.
Conclusions and Outlook
Progress in UAV and Lidar sensor technology is enabling the capture of submerged topography and the detection of complex features such as deadwood and submerged vegetation in high detail. UAV-borne topobathymetric sensors featuring laser beam divergences of ~1mrad operating at an altitude of approx. 50m provide sub-decimetre laser footprint diameters. Together with high pulse repetition rates of 200kHz and slow flying velocities of 5–6m/s, this results in point densities of more than 200 points/m2, and thus very high spatial resolution. Furthermore, sensors featuring user-definable beam divergence, receiver’s field of view and scan rate make it possible to balance depth performance and spatial resolution.
Based on the automatic classification of 3D points, it is now possible to quantify parameters of submerged deadwood (stem length and width) and littoral vegetation (vegetation height and volume). Further improvements to the processing pipelines are subject to future research. The focus is on gaining a better understanding of the interaction of green laser radiation with water and multiple small-scale objects within the laser’s line-of-sight to improve established full-waveform processing techniques to handle these complex target situations. Other topics of interest include improving the automatic classification of submerged driftwood, vegetation and the water bottom, the segmentation of individual deadwood logs, the characterization of littoral vegetation, and the independent accuracy assessment of derived metrics.